

上期我们谈了谈外骨骼:
当我们谈到了外骨骼,我们谈到了什么64 赞同 · 16 评论文章
作为一种由幻想推动的技术,科幻上早已为外骨骼发展定义出若干种发展愿景。而真实的外骨骼研究却和想象仍有很大的差距。不过在现有的技术背景下,外骨骼技术的原理早已不是什么秘密,它远非不可理解。
如果你要完成一个单人负重任务,比如让你背200公斤的柴火,让你跑到远在10公里的女友家去给她烧壁炉,温暖她冬日里冰凉的双手,你该怎么做?
容易联想到的是,既然要负重,那么让机器人替我负重就可以了,所以我得先研究一个机器人,它能承受很大的重量。这个思路没问题,理论上,我做一个智能车,我坐在上面,通过遥控来指挥它,这也算负重。

但是接下来你会发现,有点问题,这个车只能走平地,遇到崎岖的山地,就算加载了大悬挂避震系统,就算轮子做得超大,也没办法带着我稳定地爬上乱石山坡啊。因此你想到了多足式机器人,多足可以适应山地嘛。

但是又带来了问题,多足式机器人本身有自己的平衡重心,如果我坐在上面,会严重干扰它的重心,遇到大的坡面它就翻了。因此你决定不能坐在它上面,你得进入它里面。
接下来,你会感觉你就是在开车,一辆多足爬行的车。你觉得太无趣了,这车这么笨重,我只想简简单单得让一个机器人帮我背点东西,有必要弄个汽车把我装里面去?
你觉得需要便携。自行车倒是可以便携,那么做一辆多足自行车?然后你突然想到,要什么自行车?要什么多足?我自己有手有脚的,我自己可以爬山,就不能做一个机器人像我一样有手有脚的帮我爬山么。你觉得这个思路可以,再结合一下之前想到的要进入它里面,于是你想到了恋爱机器……哦不,可穿戴式人形机器人。
造一个更完美的自己,让它帮我去背东西不就可以了?但是,你可能并不想被机器人所替代。而且,你发现现在的仿人机器人,蠢的一匹,它只能做你之前规定好的事情,距离真正的智能还差得远,这个愿望遥遥不可期。

因此,你决定亲自上阵,你设置了几个按钮,分别控制这个人形机器人朝前后左右走,然后你穿上去,按按钮控制它行走。这TM难道不是一个电动轮椅?
因此你决定放弃这个愚蠢的操控方案,你觉得不要让它自己行动了,你带着它行动得了,你把人形机器人的腿绑在你腿上,让它抱住你,把你要背的负载背到它身上去。然后,你来教它如何走路,宛如一名老父亲那样。这套方案让你觉得自己白费一场功夫,让你觉得提出机器人这个想法是多么脑残,因为你觉得直接在腿上绑上一些金属杆也能完成一样的功能。
但是事情似乎有些蹊跷,你发现这个机器人的关节驱不驱动是很关键的。如果只是绑上金属杆,机械关节没有动力,那么还是相当于你自己在背着重物。但是一旦驱动了机械关节,你发现,一部分的重量被这个驱动关节使出的力给顶上了,这确实能帮你减负。
恭喜你,为了解决个人负重问题,你终于收敛到外骨骼机器人这个方案中来了。
在接下来的日子里,为了能够更轻松地给女友送柴火,你决定改进这个外骨骼机器人方案。首先你发现这个机器人自己也挺重的,你优化机械结构设计让它变得更加轻巧,你研发更轻更强的动力系统让它背的越重,你调整控制算法让它能够十分丝滑地跟随你的脚步,并在关键时刻为你助一把力,你采取了更优秀得意图识别策略让它能更懂你的想法,你研究更多的检测手段让它与你更加心心相印。渐渐地,你越来越不想去给女友送柴火了。
Story End
以上是对实现外骨骼技术的一个通俗比拟,接下来我们要谈到真正的外骨骼技术了。
上期谈到美国伯克利大学于2006年左右研发的BLEEX为外骨骼技术带来了一次小爆发,那么这期就以BLEEX为例子,谈谈外骨骼技术的相关原理。

上期谈到,负重能力是外骨骼机器人的一个关键能力,而在外骨骼系统上,负重主要是通过下肢来将负载传递到地面。尽管上肢外骨骼也同样重要,但是在没有成功的负重下肢外骨骼的前提下,上肢外骨骼的重量全部由人体自行承担,这对上肢外骨骼的重量提出了一个很大的挑战。然而对于外骨骼研究来讲,重量并不是首要急需解决的问题,结构优化减轻重量可以在后续的迭代中进行,而如果在一开始就对重量严格限制,研究门槛就要大了很多。
因此我们看到,上肢外骨骼的研究中一般做法是将装置固定在某地,然后受试者坐或站于固定位置穿戴装置进行控制研究。


所以其实伯克利大学在研究之初就清楚地将外骨骼研究划分为上肢和下肢。他们基于两个考虑:一个是上肢和下肢外骨骼的应用研究在各自的领域都同等重要;二是上下肢的研究其实是可以分开的。
在研究一个问题的时候,细分化对研究问题很有帮助,细化的问题减轻了研究难度,提供了切入点,并且细分领域的发展为该问题的研究提供了更多选择。尤其是对于交叉学科,你可以使用的选择越多,你可以达到的高度就越高。
先谈谈伯克利研究外骨骼的背景
BLEEX的研究是基于美国国防高级研究计划局(DARPA)于2000年启动的“增强人体体能外骨骼(EHPA)”计划提供的资助。事实上,美国的很多外骨骼研究都接受过DARPA的资助。
这里额外提一下这个DARPA。它是美国国防部属下的一个行政机构,专门研发用于军事用途的高新科技。是的,就是你们所想的那样——一个神秘的军事黑科技研究局。如果说洛克希德马丁是负责将军事黑科技生产出来的军火商,那么DARPA就是给洛马提供黑科技研究资料的机构。DARPA为未来几十年的战略发展培育种子计划,有时候其战略眼光比有些科幻作品还令人夸张。
2005年,伯克利大学H. Kazerooni发表在IEEE ICRA上的期刊[1]讲述了他们的研究历程。他们最初于2004年在人体工程与机器人实验室里做出了第一代BLEEX。这代BLEEX能够在背负34kg的负载下以平均1.3m/s的速度行走,支持蹲、弯腰、左右摇摆、扭腰、上下斜坡、跨步和负重下的越障。第二代的ExoHiker外骨骼的双腿还能很轻松地去掉,剩下的装备就像一个背包一样背在身上。
可以说,BLEEX是真正意义上的第一款达到可实用的负重型外骨骼机器人。
从机械整体上来看
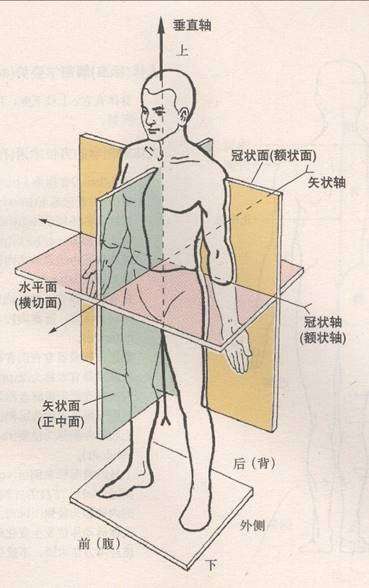
为了方便理解,先解释一下相关术语。人体左右对称面称为矢状面,人体前后相对对称的竖直剖面称为冠状面,水平面就是水平面。
人体的下肢分为三个关节,髋关节(大腿根处),膝关节(膝盖),踝关节(脚踝)。人体的下肢关节生物学结构其实都很复杂,髋关节相当于一个球窝关节,膝关节是一个滑车关节,而踝关节是也是一个滑车关节。
从运动上看,髋关节可以做屈曲和伸展运动(摆腿),外展和内收运动(张腿),和外旋内旋运动(外八字内八字);膝关节主要也做屈曲与伸展运动,同时小腿屈曲后也可以绕膝关节的垂直轴作微小的旋转运动;踝关节除了做屈曲与伸展运动(勾脚伸脚),轻微的外旋内旋运动,还可以做微小的外展和内收运动,这个微小运动也是很多崴脚的来源。
总的来说,人体每条腿一共有8个自由度。

显然BLEEX并不想驱动所有的自由度。很容易理解,人体走路时,腿的运动一般都在矢状面内,只有当需要作出其他复杂运动的时候才需要其他方向的自由度。一般来说,做复杂动作的时候,也主要是那几个大的腿部肌肉在用力。因此驱动矢状面上的各关节的屈/伸自由度是很自然的。
因此,BLEEX在每条腿上设计了7个自由度,分别为:
髋关节3个,驱动屈/伸,外展/内收自由度;
膝关节1个且驱动;
踝关节3个,只驱动屈/伸自由度。
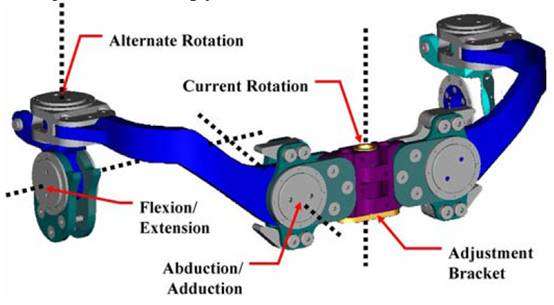
因为人体是内骨骼,髋关节的三个自由度来自于球窝关节。但是外骨骼穿着在人身上,随着人体下肢运动,很难设计出一种外骨骼式髋关节使其三个自由度轴线每时每刻都交于球窝处。因此BLEEX让屈/伸、外展/内收自由度交于球窝,而外旋/内旋自由度通过两个平行竖直轴线的旋转自由度实现。
人体膝关节是一个复杂的滑车关节,为了结构简化设计与稳定性,BLEEX没有对膝关节进行仿生,采用了普通的铰链旋转关节设计。这样做符合直觉,但是仍会带来人机运动不协调的问题,因为人体膝关节并没有一个固定的旋转中心。但是Adam Zoss等人在权衡中还是选择了这样做。

人体的踝关节也是一个滑车关节,其屈/伸旋转中心与外展/内收轴线也不重合。BLEEX只将屈/伸自由度结构设计得与人体关节重合,其他两个自由度都不重合。同时外展/内收、外旋/内旋自由度设计为被动关节,并用加上合适的阻抗以让关节位置容易自动“回正”。
接下来是动力系统
和广大科幻想象一样,伯克利大学首先也想到了将液压作为动力来源。既然要大负重,那么动力够猛的液压系统应该是首要考虑到的。
他们认为液压作动器是能想到的最小的作动器了。同时液压系统的不可压缩性带来了高的控制带宽(高控制带宽意味着系统的截止频率很高,对高频控制信号能得到不失真的响应,也就是能更加灵敏、快速的进行控制)。没有选择液压马达的原因是液压马达的内部泄露比较严重,这会降低其功率。液压马达还存在着很大的摩擦,这样也会导致功率损失。
但是他们也不是没有注意到液压系统的缺点,伺服阀在高压下会损失很多能量。但是他们忍了!
BLEEX采用了6.9MPa恒压液压源,19.05mm内缸直径的双作用线性液压缸作为作动器,并通过双级伺服阀进行控制。
这个6.9MPa恒压液压源给每条腿控制屈/伸自由度的3个液压缸提供了1.3kW的功率输出,并额外给每条腿留出了540W的功率用来驱动髋关节的外展/内收自由度。
他们采用液压系统,我一开始以为他们肯定是掌握了小型轻型液压系统的黑科技,直到我知道了BLEEX装上负载后的总重为75kg……
前面提到了BLEEX的负重能力为34kg,那么BLEEX本身就重达41kg……这要是不开机,就快赶上你的女友的重量了。可见液压系统还是有其局限性,虽然功率质量比很猛,但是质量基数大啊。因此轻小型的液压系统研究任重道远。波士顿动力的Atlas能够后空翻也是靠强劲的液压动力系统做支撑,不过Atlas本身也够沉的。
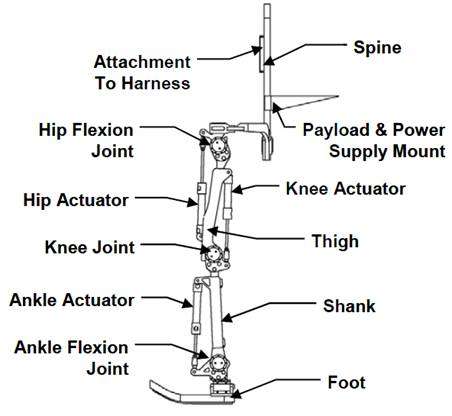
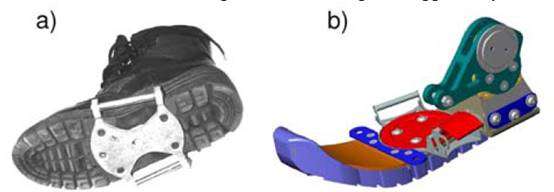
具体各个驱动关节和大小腿杆设计如图
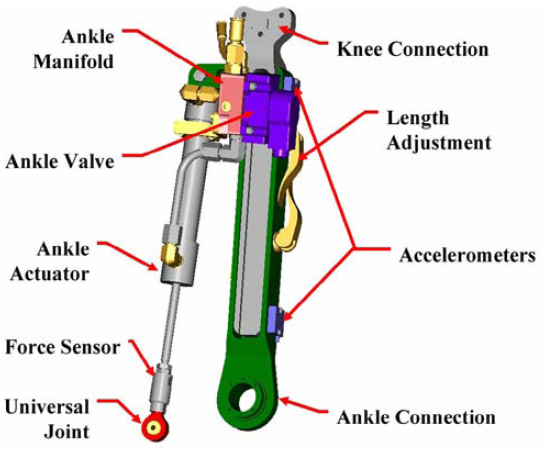
BLEEX小腿杆上采用了自行车类似的凸轮锁紧机构进行长度调节后的紧固,铰链固定了一个用于驱动踝关节的液压缸的上端,其下端会固定在外骨骼足底上。显然,当液压缸推动伸长时,踝关节伸展,液压缸收回时,踝关节屈曲,踝关节的运动范围经过几何计算确定。为了减少液压管路,使用了踝关节集成液压单元,一面直连液压伺服阀,另一面两个液压管路口通过液压管接头,连在液压缸上。使用了集成液压模块,整个小腿液压单元体积非常小。
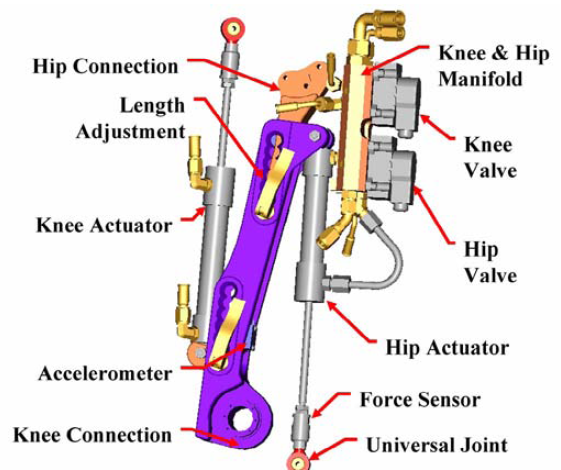
大腿杆同小腿杆,只不过集成液压单元集成了两个液压缸的管路,结构也更复杂些。因为液压缸在腿杆前后都有放置,因此凸轮锁紧长度调节机构只能放在侧面,并使用葫芦状槽孔固定调节位置。
需要注意的是,每个液压缸伸出轴都串联了二维力传感器,通过动力学模型建立,可以将作动器上的轴向力换算成关节力矩,为后面的力控提供了条件。
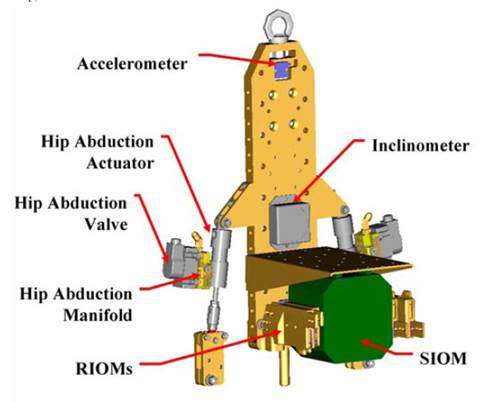
背部髋关节的外展/内收自由度使用了更短的液压缸驱动,更短意味着外展/内收自由度活动范围更小,也算一个安全限位,避免了人两腿岔开过大造成危险。顶部有圆环螺钉,在实验中可以从天花板吊绳拉住,为实验保护结构。
上面几幅图中也可以看到BLEEX使用的传感器。大小腿有加速度传感器,每个液压缸输出轴连接着单轴力传感器。背板有加速度计和姿态仪。
谈到传感器,那么得开始谈BLEEX的电气系统
BLEEX使用的电气设备在论文里[3]挨个列了出来。
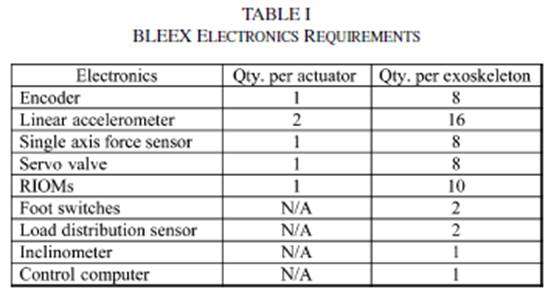
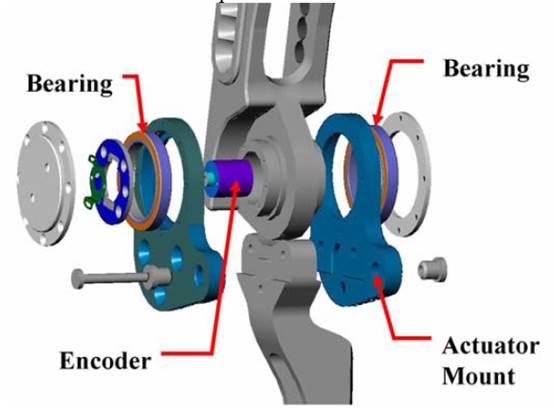
每个驱动关节有一个编码器用来测量关节角度,一对直线加速度计测量关节角加速度,以条腿3个屈/伸自由度, 1个髋关节的外展/内收自由度,因此整个外骨骼有8个编码器和16个直线加速度计。
每个液压缸有1个单轴力传感器用于力闭环控制,1个伺服阀, 1个远程信号采集模块(RIOMs),RIOMs负责数据采集与处理,并输出有效物理量到总控机里参与控制运算。由于背部还有1个加速度计和1个姿态仪,因此RIOMs一共有10个。
BLEEX的多层足底也很关键,每个足底包含了6个足底开关组,和1个负载分布压力传感器。其中足底开关组是用来检测足底何时与地面接触,负载压力分布传感器则是通过封闭压力气管末端的压力传感器检测在双足支撑态时,哪只脚承担的重量多。

除此之外,BLEEX的总控计算机SIOM放在腰后背板下方,负责控制策略的运算和控制量的输出。
看了BLEEX的电气系统,我想你会不禁产生一个问题,这外骨骼和人交互的传感器那儿去了,难道就一个足底压力吗?
这个问题十分关键,接下来就让我们看看BLEEX采用的独特控制策略方法——灵敏度放大控制。
在讨论这个控制策略前,我们再看一下BLEEX的高清大图。
我们看到,BLEEX下肢部分除了鞋的连接,其他地方根 本 没 有 连 接!
也就是说,BLEEX与穿戴者下肢的交互只发生在足底。而穿戴者的腿与BLEEX的腿是可以有相对位移的。
其实外骨骼的种类有很多,根据与人体匹配与否可以分为仿生结构和非仿生结构。如下图所示。上期中谈到的本田的Walking assist device就是典型的非仿生结构。20世纪60年代通用电气的的Hardiman外骨骼也是典型的非仿生结构(上期封面图左边)
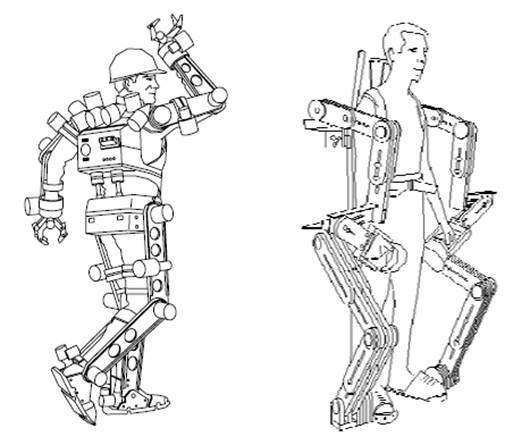
而BLEEX的机械结构如上文分析,是半仿生的(有些关节轴线与人体不相交),而BLEEX的控制策略则是想采用非仿生构型的机器人的控制思路,去控制其半仿生的机械结构。
举一个例子,最近工业界很热门的研究领域是协作机器人,也就是在工业机器人上使用柔顺控制,在与人交互的时候能够顺着人,这样一可以防止人被机器人打成重伤,二是可以将人加入到机器人工作区域中来,提高工作效率。

柔顺控制的一般做法是,在工业机械臂末端放置多维力传感器,传感器再串联操作手臂,人可以拖动操作手柄去拖动机器人。或者是,在机器人关节处集成力矩闭环,这样在施行柔性控制时,控制关节力矩不会过大,这样机械臂末端就带有一定的柔性了,除了弥补末端位置误差,比如轴插不进孔带来的机器人关节力矩过大,也在一定程度上可以保护被机械臂打到的工作人员。
那么,把外骨骼想象成一种机械臂,那么人的脚与其绑定,就相当于人在机械臂末端进行操纵。那么只要外骨骼施加柔性控制策略,那么人的脚就是操作手,用人的脚去拖动外骨骼。所以BLEEX的这种控制策略,本质上可以总结为:人带动外骨骼,而外骨骼负责承重。
那么你会说,这样岂不是增加了人的负担?本来走路就挺费劲的了,还要自己去拖动外骨骼,这外骨骼阻碍了我走路,就是个憨包。没错,采用人带动外骨骼的策略,外骨骼确实会一定程度上阻碍人体运动,但是比起背上更重的负载来说,这点阻碍其实是可以忽略的。
因此,这种控制策略需要将人带动外骨骼的力气减小到最小,这样人就能以小力带动大负载,是不是相当于将人的力气放大了?所以灵敏度放大是这个意思?
错!
灵敏度放大控制策略在BLEEX之前都从来没有应用在机器人系统上,这是一种独特的控制策略,与工业界的那些“妖艳贱货”都不一样。但它确实是一种人以小的力气带动外骨骼的策略,只是实际做法却和一般控制策略大相径庭。
由于这一期文字过多,关于灵敏度放大控制的详细过程及通俗理解,我将放到下一期详解(精彩的放在后面),敬请期待。
参考文献:
[1] Kazerooni H, Racine J L, Huang L, et al. On the control of the berkeley lower extremity exoskeleton (BLEEX)[C]//Proceedings of the 2005 IEEE international conference on robotics and automation. IEEE, 2005: 4353-4360.
[2] Zoss A, Kazerooni H, Chu A. On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX)[C]//2005 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2005: 3465-3472.
[3] Zoss A B, Kazerooni H, Chu A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX)[J]. IEEE/ASME Transactions on mechatronics, 2006, 11(2): 128-138.
其余图片来自网络
那么,能否给这篇文章求个赞呢?
欢迎有想法的同学前来交流。

彩 蛋
写完这篇文章后,我在闲逛网络上的BLEEX技术资源,竟然发现一篇讲解BLEEX外骨骼关键技术的文章,且在2018年就已经发表,而且被标为付费文档,竟然卖24.9元一篇!
为了不避免踩坑,我点进去一番观看。
然后逐渐疑惑(大笑.jpg)

每条腿40多个传感器?
我翻上去看看那个Table Ⅰ,8+16+8+8=40,恩没错,是40.
可这是整个外骨骼的传感器!其中有个8还是把伺服阀算进去的!伺服阀是传感器??
每条腿40个传感器?乖乖,牛逼。
(小小的眼睛里充满了大大的疑惑.jpg)
还有还有,瓜还没停
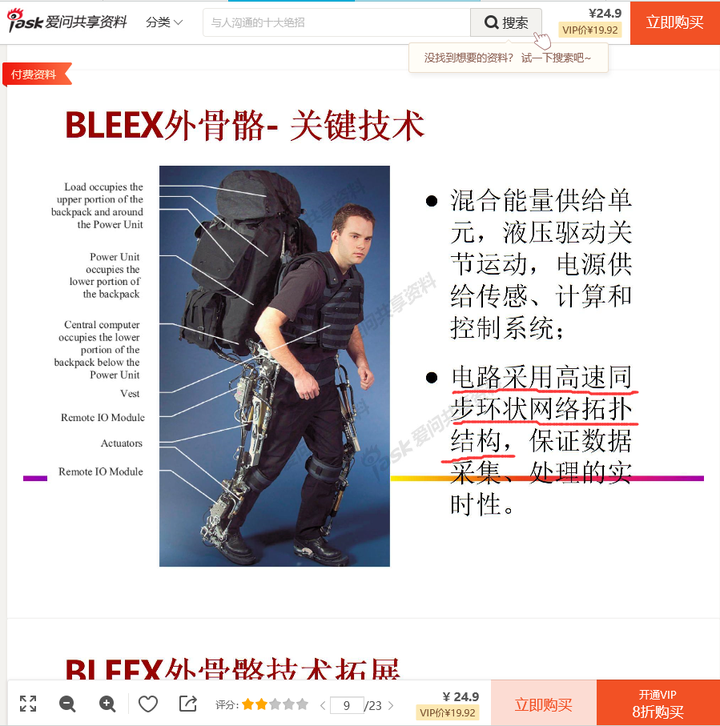
——请问,这个“高速同步环状网络拓扑结构”的电路,它好用吗?
——它不是好用不好用的问题……它是那种,很特别的,一种能让你感到自己知识不足从而被秀到的,一种电路。
——我们是专业的,我们不会笑,除非忍不住。
我的文章里提到,信号采集使用的是RIOMs(Remote I/O Modules——远程I/O模块),一共用了10个RIOMs来采集各个驱动器和传感器的数据。
信号采集嘛,不难理解,一般的信号采集分两种,模拟量采集和数字量采集。模拟量采集就是读取信号电压值,电压高低代表信号大小。数字采集就是读取数字量,通过采集电路直接将模拟量转换成了数字量,你读到的就是一个多少多少位的数而已,这种数字量采集的传感器的精度由多少位数决定,位数越多精度越高。
既然BLEEX使用的是远程I/O模块,那么应该可以想到他们用的是数字采集模块,因为读数字0和1可比读电压要稳定得多。电压信号会随着电缆的长度而发生衰减,信号太容易失真了。
于此同时,他们并没有将所有的RIOMs都一股脑地连在主控计算机上,因为这样做的话信号线太多了,他们使用了一种高速网络通信结构,每个RIOMs通过串口依次串联起来(有点像今天的CAN现场总线的连法),然后每一串的第一个RIOMs与总控计算机相连。这样进入总控计算机的数据采集线就只有4组了(左右腿上下各一组),大大减少了信号线的数量。
当然这种通信方式也需要一种合适的通信协议才能使用,这里就不展开了。

当我继续往下读的时候,我被贫穷限制了手脚

但是我有知识的大脑!
同志们,24.9¥啊,我这篇文章的价值起码比它贵吧!
读到就是赚到,四舍五入就赚了1个亿呢,嘿嘿。
彩蛋结束!
https://zhuanlan.zhihu.com/p/108524143